{kind=link}
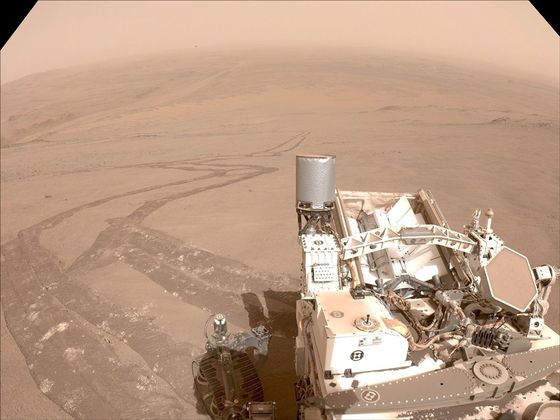
NASA’s Mars exploration Rover, Perseverance, has successfully navigated the Martian surface following a route planned by an artificial intelligence (AI) model.
NASA reported on Tuesday that Perseverance recently completed a 456-meter experimental drive using a route planned by Anthropic’s AI model, Claude. The tests were carried out on December 8 and 10 of last year.
With Mars about 140 million miles from Earth, real-time joystick control of the rover isn’t practical because of deep-space communication delays. Instead, engineers pre-plan routes using Mars surface data and transmit them to the rover in advance.
To reduce the risk of hazards, the team sets waypoints along the route. These points are typically no more than 330 feet apart, a workload that becomes harder to sustain as missions stretch on.
NASA’s Jet Propulsion Laboratory (JPL) research team sought to replace this manual process with a Vision-Language Model (VLM). They trained the Claude model using JPL’s ground mission dataset.
The team utilized high-resolution surface images from NASA’s Mars Reconnaissance Orbiter and terrain slope data from digital elevation models. Claude identified key terrain features such as bedrock, outcrops, hazardous rocky areas, and dunes to plot the route.
JPL’s engineering team validated Claude’s driving commands using a digital twin – a virtual replica of the rover. This step ensured the AI-generated instructions were fully compatible with the rover’s operational software. The process involved checking over 500,000 remote sensing variables.
This innovative approach enabled the rover to travel 210 meters on December 8 and about 807 feet (roughly 0.15 miles) on December 10 last year.
Researchers emphasized that generative AI-based driving shows great promise in streamlining the three pillars of autonomous navigation: object recognition, location awareness, and planning and control.
Matthew Wallace, JPL’s Exploration Systems Manager, envisioned applying intelligent systems to various surface exploration equipment, such as rovers, helicopters, and drones. He predicted that these systems would evolve through the collective data amassed by NASA’s engineers, scientists, and astronauts.
Wallace highlighted this technology as a potential game-changer for establishing permanent human habitats on the Moon and developing the infrastructure necessary for future Mars exploration.
The Perseverance rover, produced and operated by NASA and JPL, was launched on July 30, 2020. After a 292.7-million-mile journey, it reached Mars in February 2021. Its landing site, Jezero Crater, is believed to be an ancient river delta, offering exciting possibilities for scientific discovery.