{kind=link}
Robots can now learn human-like dexterity for tasks such as inserting components into tight spaces or pressing small buttons, using minimal data.
On Wednesday, the Korea Advanced Institute of Science and Technology (KAIST) announced that a research team led by Professor Park Dae-hyung from the Department of Computer Science has developed a multi-precision manipulation model called DiSPo. This innovative model can generate precise movements tailored to user-specified accuracy using only a small amount of motion data.
This groundbreaking technology has boosted task success rates by up to 81% compared to existing top-performing models, promising to significantly expand the applications of robots in precision manufacturing and medical fields.
Previously, robotic artificial intelligence (AI) systems required vast amounts of data, recorded at extremely short intervals, to perform precise tasks. Learning complex operations like tightening screws or fitting components into narrow spaces demanded extensive, detailed motion data collection, which was both time-consuming and expensive.
To address these challenges, the research team developed AI technology enabling robots to predict movement changes and learn various actions independently. They introduced a novel feature allowing robots to fine-tune or broadly adjust movements based on specific task requirements.
The team achieved this functionality by combining Mamba, a state-space model that efficiently learns temporal changes, with a diffusion model generating diverse actions. They introduced a step adjustment coefficient mechanism in Mamba’s internal discretization process.
Mamba predicts and discretizes time intervals from input signals, while the step adjustment coefficient allows users to directly control the model’s time intervals with desired precision.
Consequently, even with limited data, the robot can execute tasks with more refined movements. A simple demonstration by a human allows the robot to autonomously refine its actions for precise task execution as needed.
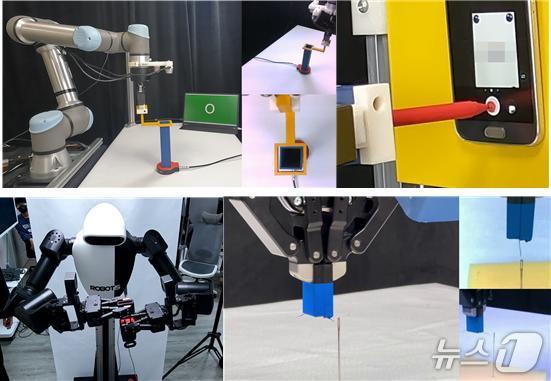
In simulated environments, DiSPo achieved task success rates up to 81% higher than existing top-performing models. Real-world experiments with collaborative robots demonstrated reliable performance in complex tasks, such as inserting parts into a narrow 2.5 mm space and accurately pressing a smartphone’s tiny shutter button. These tests showed success rates up to four times higher than existing AI models.
This technology is poised to revolutionize industries requiring high precision, including component assembly, cable connections, surgical procedures, and precision machining.
The research team believes their ability to train high-precision robots with minimal data will dramatically reduce robot development costs and accelerate automation across manufacturing, healthcare, and service sectors.
Professor Park explained that this research showcases robots’ ability to learn intricate movements with minimal data and autonomously adjust precision based on task requirements. It aims to evolve this into a versatile robot learning technology applicable in various industrial settings, such as precision manufacturing and healthcare, while significantly reducing data collection costs.
The research, with master’s student Oh Na-young as the lead author, was presented at the International Conference on Robotics and Automation (ICRA 2026) in Vienna, Austria.